SCADA
Supervisory Control and Data Acquisition
A SCADA (Supervisory Control and Data Acquisition – Felügyeleti Vezérlés és Adatgyűjtés) nem egyetlen eszköz, hanem egy teljes szoftveres–hardveres keretrendszer. Feladata az ipari folyamatok valós idejű megfigyelése, vezérlése és az adatok hosszú távú naplózása. A SCADA rendszer a gyár vagy üzem „agya”: összegyűjti az összes érzékelő és vezérlő adatát, megjeleníti azokat egy kezelői felületen (HMI), és riaszt, ha valami kritikus határt lép át.
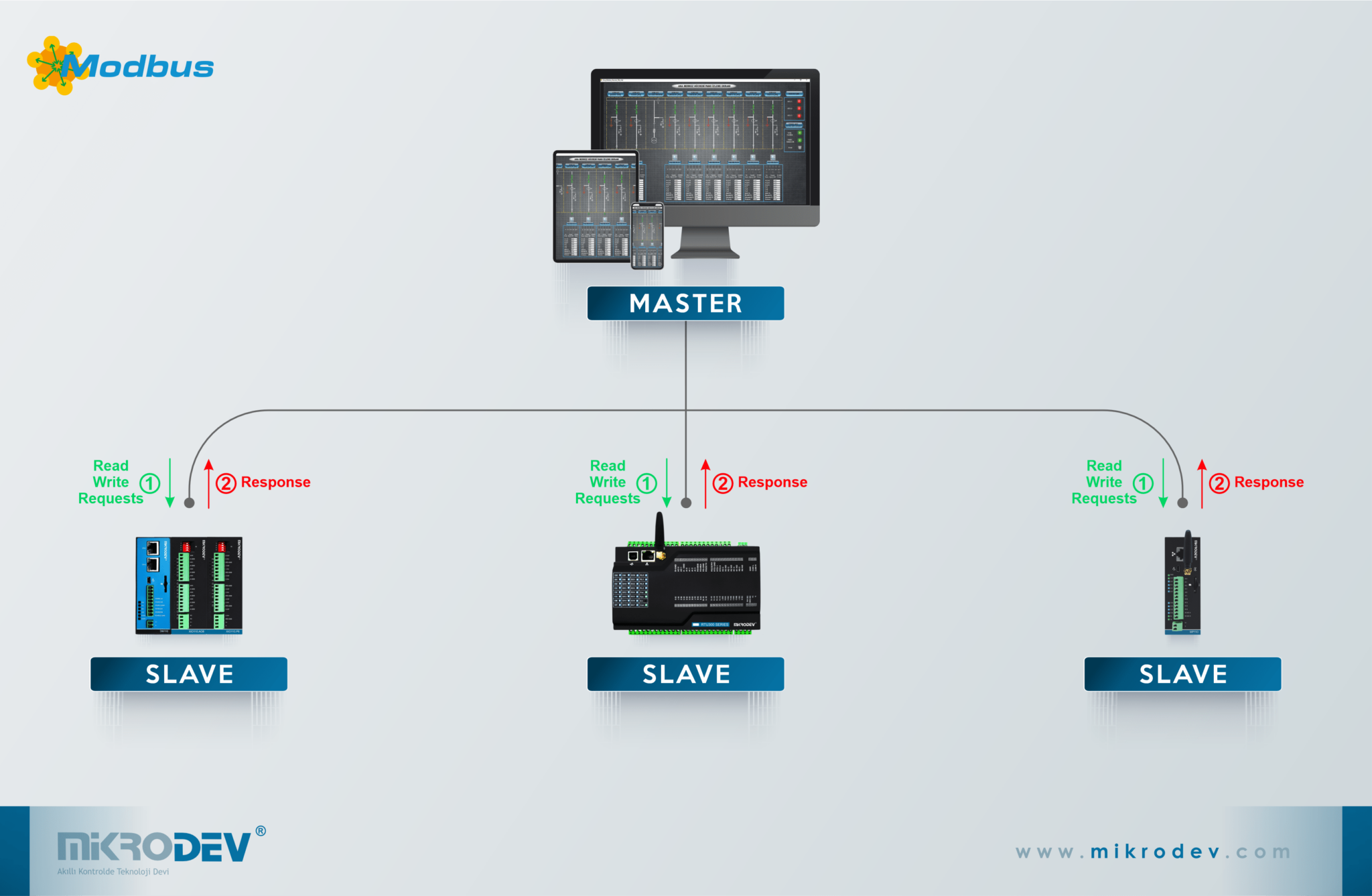
Egy tipikus SCADA rendszer három fő rétegből áll: az érzékelők és beavatkozók (szenzorok, szelepek, motorok) a legalsó rétegen találhatók, ezek gyűjtik a fizikai adatokat. Felettük a PLC-k és RTU-k (Programmable Logic Controller / Remote Terminal Unit) dolgoznak, amelyek helyi logikát futtatnak és kommunikálnak a SCADA szerverrel. A csúcson a SCADA szoftver áll, amelyen az operátor valós időben látja a folyamatot, beavatkozhat, és az összes mérési adat egy SQL alapú Historian adatbázisba kerül archiválásra.
Hol találkozhatunk vele? Erőművekben, gázszolgáltatókban, vízkezelő telepeken, autógyárakban és közlekedésirányításban. Ha egy diszpécser egy monitoron figyeli a tartályok szintjét és egy kattintással megnyit egy szivattyút, SCADA-t használ.